|
Kinetis SDK v.1.3 API Reference Manual
Rev. 0
Freescale Semiconductor, Inc.
|
|
Kinetis SDK v.1.3 API Reference Manual
Rev. 0
Freescale Semiconductor, Inc.
|
This chapter provides the architectural overview for the Kinetis Software Development Kit (KSDK). It describes each layer within the architecture and its associated components.
Overview
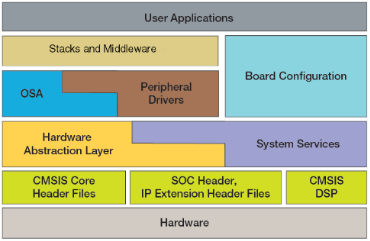
The KSDK architecture consists of eight key components listed below.
Applications based on the KSDK architecture
This image shows how each component stacks up.
The Kinetis SDK consists of these runtime software components written in C:
Kinetis MCU header files
The KSDK contains CMSIS-compliant device-specific header files which provide direct access to the Kinetis MCU peripheral registers. Each supported Kinetis MCU device in KSDK has an overall System-on-Chip (SoC) memory-mapped header file. This header file contains the memory map and register base address for each peripheral and the IRQ vector table with associated vector numbers. The overall SoC header file provides an access to the peripheral registers through pointers and predefined masks.
In addition to the overall SoC memory-mapped header file, the KSDK includes extension header files for each peripheral instantiated on the Kinetis MCU. The extension header files take advantage of the bit band feature when reading from or writing to 1-bit wide fields within a register. Macros are provided in the SoC memory-mapped header files for accessing register bit fields. When accessing the register macros in the extension header file, the user must pass in the register base address for the desired peripheral as a pointer to <IP>_Type structure. The KSDK HAL Driver (discussed later) API functions take in the base address and then passes this into the extension header file macros for peripheral register accesses.
Along with the SoC header files and peripheral extension header files, the KSDK also includes common CMSIS header files for the ARM Cortex-M core and DSP library from the latest CMSIS release. The CMSIS DSP library source code is also included for reference. These files and the above mentioned header files can all be found in the KSDK platform/CMSIS directory.
System Services
The KSDK System Services contain a set of software entities that can be used by the Peripheral Drivers. They may be used with HAL Drivers to build the Peripheral Drivers or they can be used by an application directly. The following sections describe each of the System Services software entities. These System Services are in the KSDK platform/system directory.
Interrupt Manager
The Interrupt Manager provides functions to enable and disable individual interrupts within the Nested Vector Interrupt Controller (NVIC). It also provides functions to enable and disable the ARM core global interrupt (via the CPSIE and CPSID instructions) for bare-metal critical section implementation. In addition to providing functions for interrupt enabling and disabling, the Interrupt Manager provides Interrupt Service Routine (ISR) registration that allows the application software to register or replace the interrupt handler for a specified IRQ vector. The KSDK drivers do not set interrupt priorities. The interrupt priority scheme is entirely determined by the specific application logic and its setting is handled by the user application. The user application manages the interrupt priorities by using the NVIC functions provided in the ARM Cortex-M core CMSIS header file.
Clock Manager
The Clock Manager provides centralized clock-related functions for the entire system. It can dynamically set the system clock and perform clock gating/un-gating for specific peripherals. The Clock Manager also maintains knowledge of the clock sources required for each peripheral and provides functions to obtain the clock frequency for each supported clock used by the peripheral. The Clock Manager provides a notification framework which the software component of the KSDK, such as drivers, uses to register callback functions and execute the predefined code flow during the clock mode transition.
Power Manager
The Power Manager provides centralized power-related functions for the entire system. It dynamically sets the system power mode and configures the LLWU wakeup setting. The Clock Manager provides a notification framework which the software component of the KSDK, such as drivers, uses to register callback functions and execute the predefined code flow during the clock mode transition.
Unified Hardware (HW) Timer
The Unified HW Timer provides a common timer interface that can be linked with any supported Kinetis MCU hardware timer peripheral or with the ARM core system timer (SysTick) to perform basic timer operations. It can be used as a shared timer capable of microsecond resolution for bare-metal use-cases, such as to time guard busy loops. It can also be used when interfacing with an RTOS to provide operating system (OS) time ticks. Future implementations of the Unified HW Timer will take advantage of low power timer peripherals that will allow OS ticks to continue when the system is in various lower power modes.
Hardware Abstraction Layer (HAL)
The KSDK HAL consists of low-level drivers for the Kinetis MCU product family on-chip peripherals. The main goal is to abstract the hardware peripheral register accesses into a set of stateless basic functional operations. The HAL itself can be used with system services to build application-specific logic or as building blocks for use-case driven high-level Peripheral Drivers. It primarily focuses on the functional control, configuration, and realization of basic peripheral operations. The HAL hides register access details and various MCU peripheral instantiation differences so that, either an application or high-level Peripheral Drivers, can be abstracted from the low-level HW details. Therefore, hardware peripheral must be accessed through HAL.
The HAL can also support some high-level functions with certain logic, provided these high-level functions do not depend on functions from other peripherals, nor impose any action to be taken in interrupt service routines. For example, the UART HAL provides a blocking byte-send function that relies only on the features available in the UART peripheral itself. These high-level functions enhance the usability of the HAL but remain stateless and independent of other peripherals. Essentially, the HAL functional boundary is limited by the peripheral itself. There is one HAL driver for each peripheral and the HAL only accesses the features available within the peripheral. In addition, the HAL does not define interrupt service routine entries or support interrupt handling. These tasks must be handled by a high-level Peripheral Driver together with the Interrupt Manager.
The HAL drivers can be found in the KSDK platform/hal directory.
Feature Header Files
The HAL is designed to be reusable regardless of the peripheral configuration differences from one Kinetis MCU device to another. An overall Peripheral Feature Header File is provided for KSDK-supported MCU device to define the feature or configuration differences for each Kinetis sub-family device.
Design Guidelines
This section summarizes the design guidelines that were used to develop the HAL drivers. It is meant for information purposes and provides more details on the make-up of the HAL drivers. As previously stated, the main goal of the HAL is to abstract the hardware details and provide a set of easy-to-use low-level drivers. The HAL itself can be used directly by the user application; in this case, the high-level Peripheral Drivers that are built on top of the HAL serve as a reference implementation and to demonstrate the HAL usage. The HAL is mainly focused on individual functional primitives and makes no assumption of use-cases. It also implements some high-level functions with certain logic without dependencies from other peripherals and does not impose any interrupt handling. The HAL APIs follow a naming convention that is consistent from one peripheral to the next. This is a summary of the design guidelines used when developing the HAL drivers:
There is a dedicated HAL driver for each individual peripheral. Peripherals with different versions or configurations are treated as the same peripheral with differences handled through a feature header file. HAL should hide both the peripheral and MCU details and differences from the high-level application and drivers.
Each HAL driver has an initialization function to put the peripheral into a known default state (i.e., the peripheral reset state). There is no corresponding de-initialization function.
Each HAL driver has an enable and disable function to enable or disable the peripheral module.
The HAL driver does not have an internal operation context and should not dynamically allocate memory.
The HAL provides both blocking and non-blocking functions for peripherals that support data transaction-related operations.
The HAL may implement high-level functions based on abstracted functional primitives, provided this implementation does not depend on functions outside of the peripheral and does not involve interrupt handling. The HAL must remain stateless.
Peripheral Drivers
The KSDK Peripheral Drivers are use-case driven high-level drivers that implement high-level logic transactions based on one or more HAL drivers, other Peripheral Drivers, and/or System Services. Consider, for example, the differences in the UART HAL and the UART Peripheral Driver. The UART HAL mainly focuses on byte-level basic functional primitives, while the UART Peripheral Driver operates on an interrupt-driven level using data buffers to transfer a stream of bytes and may be able to interface with DMA Peripheral Driver for DMA-enabled transfers between data buffers. In general, if a driver, that is mainly based on one peripheral, interfaces with functions beyond its own HAL and/or requires interrupt servicing, the driver is considered a high-level Peripheral Driver.
The KSDK Peripheral Drivers support all instances of each peripheral instantiated on the Kinetis MCU by using a simple integer parameter for the peripheral instance number. Each Peripheral Driver includes a “common” file, denoted as fsl_<peripheral>_common.c (where <peripheral> is the name of the peripheral for which the driver is written). This file contains the translation of the peripheral instance number to the peripheral register base address, which is then passed into the HAL. Hence, the user of the Peripheral Driver does not need to know the peripheral memory-mapped base address.
The Peripheral Drivers operate on a high-level logic that requires data storage for internal operation context handling. However, the Peripheral Drivers do not allocate this memory space. Rather, the user passes in the memory for the driver internal operation through the driver initialization function. Note that HAL is used for MCUs with restricted RAM and FLASH size.
The Peripheral Drivers are designed to handle the entire functionality for a targeted use-case. An application should be able to use only the Peripheral Driver to accomplish its purpose. The mixing of the Peripheral Driver and HAL by an application for the same peripheral can be done, but is discouraged for architectural cleanliness and to avoid cases where bypassing the Peripheral Driver results in logic errors within the Peripheral Driver.
The Peripheral Drivers can be found in the KSDK platform/drivers directory.
Interrupt Handling
Interrupt-driven Peripheral Drivers are designed to service all interrupts for their desired functionality. Each Peripheral Driver implements a set of easy-to-use APIs for a particular use-case. Each Peripheral Driver also exposes interrupt functions that implement all actions taken when serving a particular interrupt. These interrupt action functions take in the peripheral instance number as an input parameter. All Interrupt Service Routine (ISR) entries for the Peripheral Driver are implemented in a separate C file named the fsl_<peripheral>_irq.c, which is located in the top level of the Peripheral Driver folder. The ISR entries invoke a corresponding interrupt action functions that are implemented in the driver and are exposed as part of the driver public interfaces. Each interrupt action function is hard coded with the peripheral instance number. Note that the IRQ file depends on the Peripheral Driver but the driver does not depend on the IRQ file.
The CMSIS startup code contains the vector table with the ISR entry names which are defined as weak references. The Peripheral Driver ISR entry names match the names defined in the vector table such that these newly-defined ISR entries in the driver replace the weak references defined in the vector table. There is no dependency on the location of the vector table. However, if the vector table is re-located (normally to RAM), the ISR entry names should remain consistent.
Each Peripheral Driver IRQ file defines the ISR entries for all instances of the peripheral instantiated on the MCU. Any unused ISR entries can be safely deleted in the user application. Note that, when building driver libraries for a particular MCU, the IRQ files are not part of the library build. When developing an application, however, include these IRQ files into the application project space.
If you want to use the HAL to directly build an interrupt-driven application or a high-level driver, define the ISR entries to service needed interrupts. The ISR entry names have to match the names of the ISR entry names provided in the CMSIS startup code vector table. Normally, the vector table is relocated to RAM during system startup and the ISR entry names remain unchanged. However, should these ISR entry names change, the user is required to register the newly defined ISR entry table names by invoking the Interrupt Manager registration function.
When working with an RTOS, if the target operating system has its own interrupt handling mechanism, the user’s ISR has to dynamically register the internal vector table maintained inside the OS via the service routine provided by the OS. Some operating systems do not have dedicated interrupt handling, and no special handling is required. Most of the RTOSes designed for the Cortex-M core use PendSV exceptions for scheduling. The PendSV exceptions are low priority and execute only when all other interrupts have been serviced. There are special cases where interrupt handling prologues and epilogues have to be called at the beginning and at the end of an ISR to inform the OS of the entry and exit of an ISR so that the OS scheduler does not trigger a rescheduling event while the system is servicing interrupts. The OS Abstraction layer provides prologues and epilogues in a uniform API for all supported OS.
Peripheral Driver Types
Peripheral Drivers are designed and operated on use-case driven high-level logic. For that reason, the interaction between a Peripheral driver and other software components has a few limitations. This is a list of typical KSDK Peripheral Driver types to demonstrate this concept:
Peripheral Drivers that use one HAL for a particular IP and system services
Peripheral Drivers that use multiple HAL components and System Services. An example involves a Peripheral Driver that uses both the DMA HAL and the I2C HAL to build a DMA-enabled high-level I2C driver. At the same time, a DMA Peripheral Driver already exists and provides the overall DMA channel management. In this situation, issues can arise for the dedicated DMA Peripheral Driver because it is unaware of use of resources for the DMA-enabled I2C driver that accesses the DMA HAL directly. In this case, the KSDK Peripheral Drivers will only use the DMA HAL when configuring the DMA Transfer Control Descriptor for a particular channel that is dedicated to the driver and avoid using the DMA HAL to change the DMA peripheral control registers. The DMA channel allocation for a particular Peripheral Driver is normally assigned during the initialization of the peripheral by calling the DMA Peripheral Driver channel request function. In this way, the DMA maintains a used channel registry.
Design guidelines
This section summarizes the design guidelines to develop the Peripheral Drivers. In this list, the term Peripheral Driver is replaced with the acronym “PD”:
The PD does not directly access hardware registers and only uses HAL to interface with hardware. It uses other PDs indirectly to access hardware functions.
The PD does not dynamically allocate memory and does not assume any static configuration at compile-time. It supports run-time configurations by taking in a configuration data structure from the Application in an initialization function. This initialization function also takes in the memory allocated for internal operational context storage needs. The PD only reads from the configuration data structure. The configuration data structure is defined as “const”.
The PD supports an initialization function and has a corresponding de-initialization function.
The PD supports both blocking and non-blocking functions for data transactions.
The PD does not depend on any software or hardware entities that do not relate to any of the peripherals available on the Kinetis platform. For example, the Ethernet (ENET) PD does not depend on an external ENET PHY, even if the ENET PD does not function without an associated external PHY.
If the PD is built on top of HAL, the PD can work with any instance of the peripheral by taking the instance number as a parameter. When global data is shared across multiple instances, the global data access has to be protected when working with an RTOS. This can be done using the critical section functions implemented as part of the RTOS abstraction. This data access protection is addressed with the bare-metal OS abstraction implementation when no RTOS is used.
When the ISR and other public API functions within the driver access the PD internal operation context, that data must be defined as volatile so that compiler does not inadvertently optimize the code resulting in an undesired functionality.
The PD provides enough functions to allow the APIs provided by PD to meet the target use-case implementation. The user application should not mix the use of both a PD and HAL .
Demo Applications
The Demo Applications provided in the KSDK provide examples, which show how to build user applications using the KSDK framework. The Demo Applications can be found in the KSDK top-level demo directory. The KSDK includes two types of demo applications:
Demo Applications that demonstrate the usage of the Peripheral Drivers.
Board Configuration
The KSDK drivers make no assumption on board-specific configurations nor do the drivers configure pin muxing, which are part of the board-specific configuration. The KSDK provides board-configuration files that un-gate clocks for related I/O ports, configure pin muxing for the entire board, and functions that can be called before driver initialization. These board-configuration files can be found in the KSDK top-level board directory.
In addition, the KSDK also contains a set of drivers in the boards/common directory for common devices (such as SPI flash and ENET PHY) found on the Kinetis platform evaluation boards. These drivers are included mainly for a convenient out-of-box experience and to demonstrate how to build use-case-driven reference designs.
OS Abstraction layer
The KSDK drivers are designed to work with or without an RTOS. The Operating System Abstraction layer (OSA) is designed and implemented for supported RTOS to provide a common set of service routines for drivers, integrated software solution, and upper-level applications so that a common code base can be used regardless of the target OS.
The services supported by the OSA are driven by the driver requirements, supported middleware, and applications. The OSA layer is designed to be as thin as possible. The OSA either maps the desired services to the services provided by the target OS or implements the services that the target OS does not support.
The OSA itself does not dynamically allocate memory for implementing an OS service component. Instead, the memory for OS components is allocated by the caller and is passed into the OSA for servicing. The OSA drivers can be found in the KSDK platform/osa directory.
Software Stacks and other Middleware integration
The core of the Kinetis SDK is a set of common driver libraries built for all Kinetis MCU product family peripherals. Kinetis SDK also provides a foundation for software stacks and other middleware. The KSDK integrates other Freescale or third party enablement software stacks, such as a USB stack and a TCP/IP stack and other middleware, to offer a complete, easy-to-use, software development kit to the Kinetis MCU users. The KSDK framework integrates all Kinetis MCU software solutions for the Kinetis product families.

